
The first egg robot was hatched when Bruce Shapiro in 1990 dreamed up the Eggbot™. Bruce published it as an open-source design for both software and hardware however the name is trademarked. While it is available for purchase as a whole machine, I wanted to see if I could 3D print one myself since the initial cost was large.
I found another design by Probot that seemed to do a reasonable job, and although many of the other ones such as the SphereBot are larger this one seemed to produce reasonable quality and I had most of the parts:
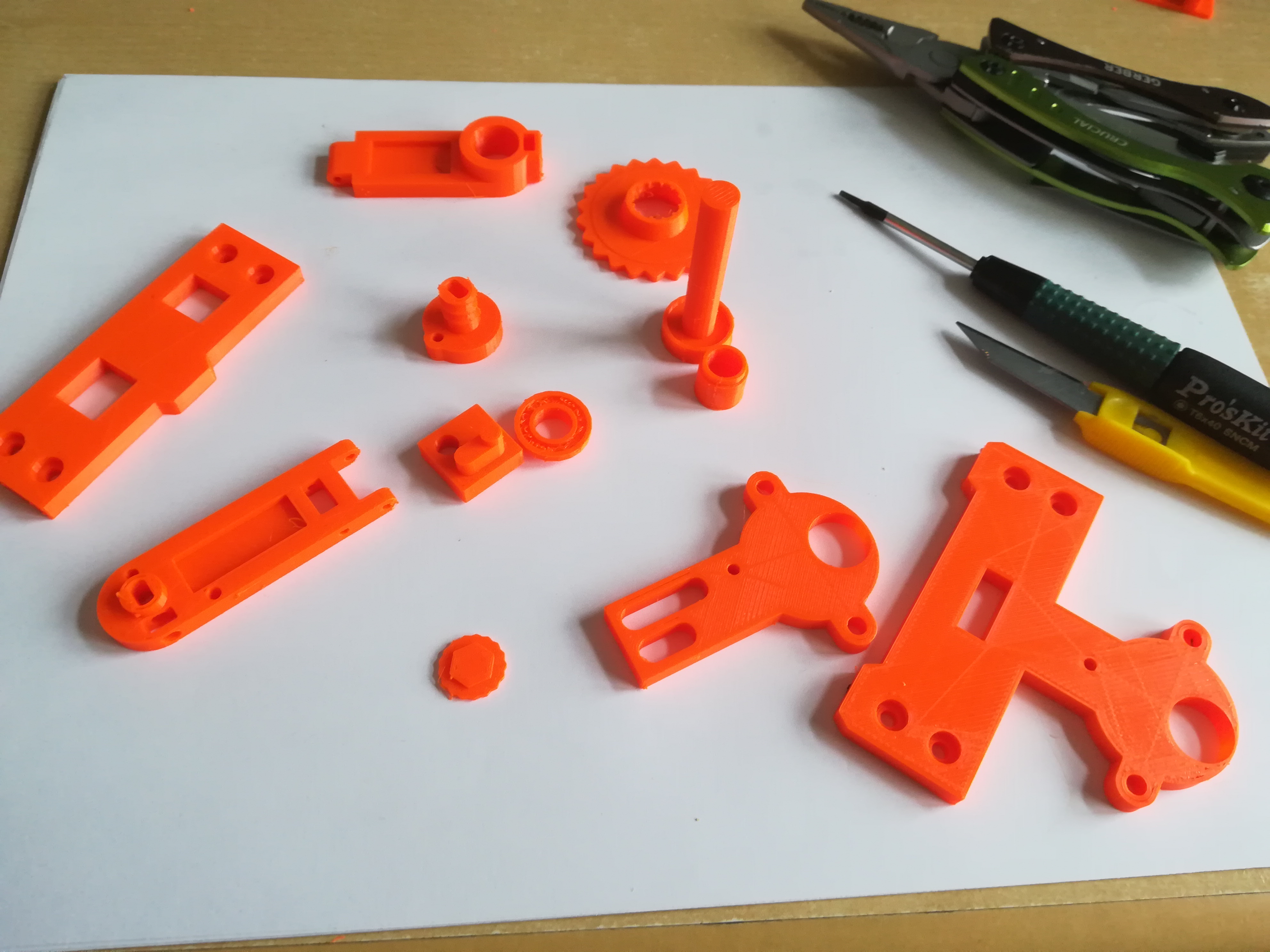
- 308zz bearings
- 3D printer to print parts
- Arduino
- silicon egg cups moulds
- stepper motors
- stepper motor controllers
… and that was about it. Most of those I had, the rest I could order easily (for example, I had Nema-17 steppers and this only required 28byj-48 ones, either 5V or 12V). So, in a fit of decision I launched into building it and surprised myself with how quickly it came together.
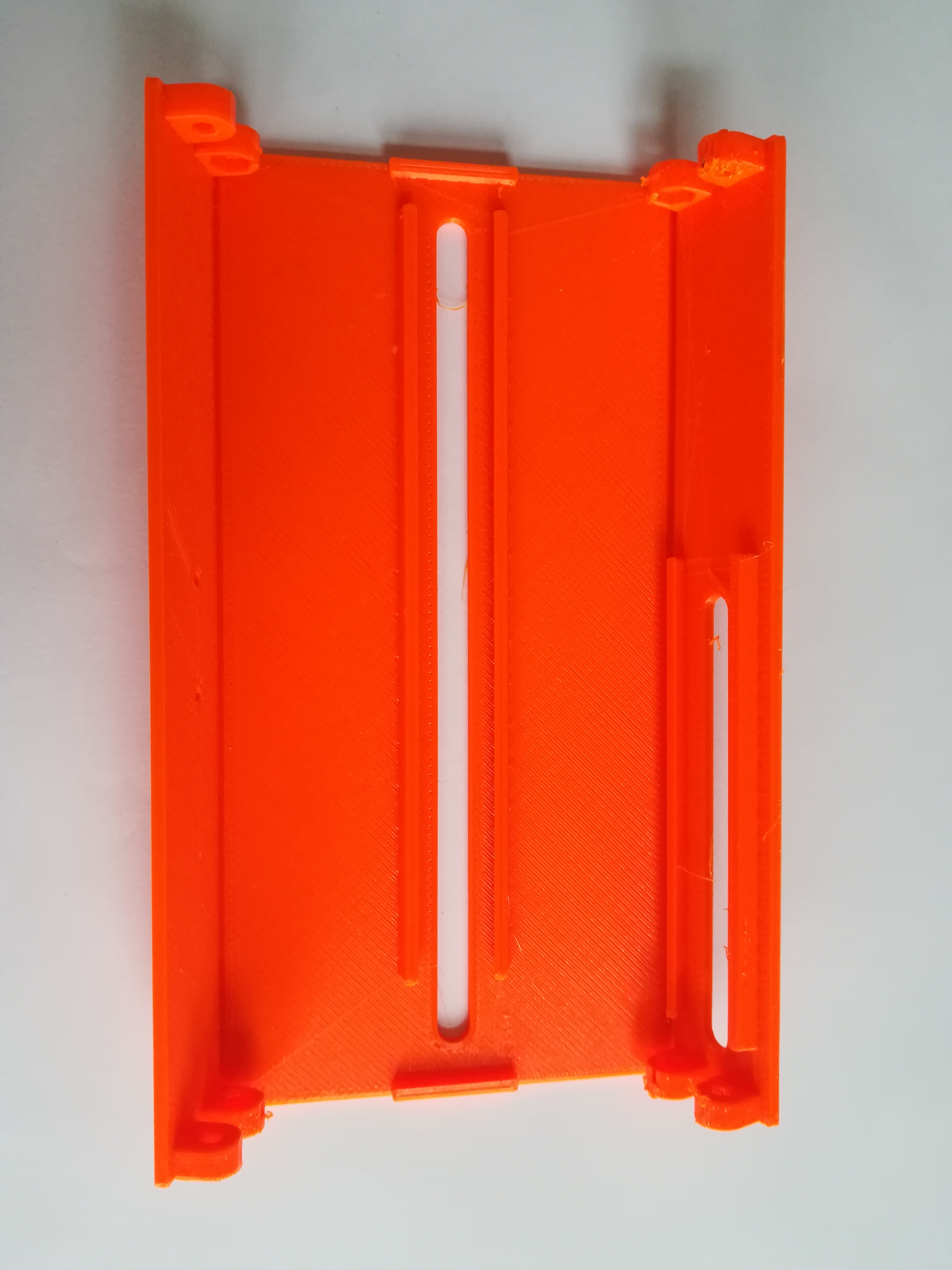
The base and cover are easy to print with the sides of the cover bending into a living hinge. The ends are bolted shut and there is a sliding swing arm and end stanchion. The living hinge is an interesting design choice which leads me to believe that the designers were very familiar with 3D printing as it avoids overhangs in the upright sections of the print. It does make a very neat and attractive package when finished.
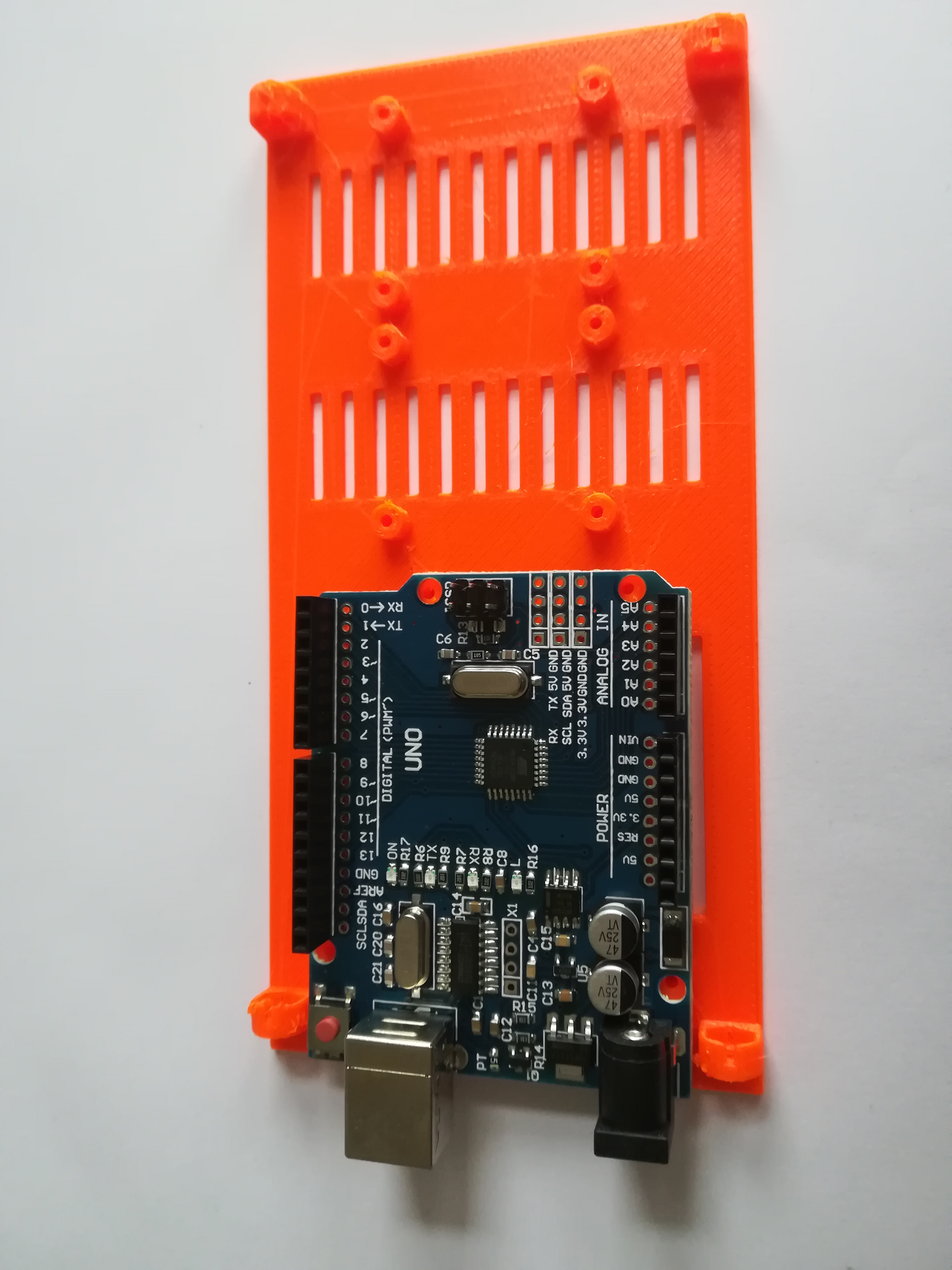
The challenge comes because of the interaction between different things which were not designed together: hardware and software. The original hardware has an actual PCB created to control the movement, whereas the design I am using replaces that with an Arduino running software called EggDuino. That software has to emulated the responses and obey the commands expected from the original PCB so that it can print things. All this is controlled by an extension to the open-source software called InkScape that sends commands to the egg-robot! Lots of moving parts in this design and 3 different things created by different people does give lots of room for error. So the process goes like this:
Inkscape → Eggbot extension → Arduino running EggDuino → egg

The ‘tail stock’ – if this were a lathe – is based on a printed part with a 308zz bearing inside. The 308zz are a very common type of bearing, sometimes called ‘skateboard bearings’ as they are ubiquitously used for skateboard wheels.
Once completed the whole machine is connected to a computer by USB cord and you use Inkscape to create and print the eggs.
